

技術(shù)小課堂丨拉壓復(fù)合加載式真三軸研制


為了更準(zhǔn)確地模擬深部工程軟巖體所處的真三軸應(yīng)力狀態(tài),同時(shí)為研究單向快速卸載條件下的巖石變形破壞機(jī)制,本文研制了一種拉伸-壓縮-瞬時(shí)卸載復(fù)合加載式軟巖真三軸試驗(yàn)機(jī)。該試驗(yàn)機(jī)由加載框架、電動(dòng)加載系統(tǒng)、夾具、電磁式瞬時(shí)卸載系統(tǒng)、控制系統(tǒng)、軟件系統(tǒng)組成。該試驗(yàn)機(jī)的創(chuàng)新性和先進(jìn)性功能有:(1)可實(shí)現(xiàn)多種應(yīng)力路徑下的單軸、雙軸、真三軸、巖爆、聲發(fā)射、低頻擾動(dòng)等試驗(yàn);(2)采用電動(dòng)伺服作動(dòng)器實(shí)現(xiàn)真三軸剛性加載,具有加卸載平穩(wěn)、節(jié)能環(huán)保的特點(diǎn);(3)加載頭采用球面壓頭,保證加載端面與試樣充分接觸,采用雙層滾排減小端部摩擦效應(yīng)的影響;(4)采用電磁吸盤(pán)技術(shù)的瞬時(shí)卸載裝置實(shí)現(xiàn)快速卸載功能;(5)采用力控制監(jiān)控位移的雙層控制方式,保證在加卸載過(guò)程中試樣中心不變,與加載中心重合。最終通過(guò)力、位移、變形標(biāo)定工作后,再進(jìn)行功能驗(yàn)證和綜合試驗(yàn)。結(jié)果表明。該試驗(yàn)機(jī)的準(zhǔn)確性、功能性、可靠性滿足軟巖真三軸應(yīng)力條件下的力學(xué)特性研究需求。
PART
深部工程巖體處于真三向應(yīng)力狀態(tài)(σ1>σ2>σ3)。研究表明,中間主應(yīng)力(σ2),對(duì)巖體的力學(xué)性質(zhì)影響較大,常規(guī)三軸(σ1>σ2=σ3)力學(xué)試驗(yàn)已無(wú)法準(zhǔn)確再現(xiàn)巖體的變形破壞行為。
高地應(yīng)力條件下的軟巖大變形是困擾隧道與地下工程界的重大地質(zhì)災(zāi)害問(wèn)題,已成為地下工程的世界性技術(shù)難題。國(guó)際巖石工程界普遍需要軟巖真三軸試驗(yàn)設(shè)備,以解釋軟巖在真實(shí)復(fù)雜應(yīng)力狀態(tài)下的變形破壞行為和力學(xué)機(jī)理。真三軸卸荷試驗(yàn)作為一種模擬開(kāi)挖擾動(dòng)誘發(fā)地質(zhì)災(zāi)害的重要手段而受到廣泛關(guān)注,單向快速卸荷條件下的巖石變形破壞機(jī)制也是巖石力學(xué)試驗(yàn)領(lǐng)域的熱門(mén)課題,業(yè)界普遍希望巖石真三軸試驗(yàn)機(jī)引入瞬時(shí)卸荷功能。
另外,目前對(duì)于應(yīng)力空間第七象限三向拉伸以及其他雙向、三向拉伸區(qū)段的巖石強(qiáng)度理論,大多處于推測(cè)階段,缺乏多軸拉伸試驗(yàn)數(shù)據(jù)驗(yàn)證。而對(duì)于實(shí)際工程而言,巷道開(kāi)挖后距側(cè)墻表面一定距離的巖石單元受力狀態(tài)應(yīng)為“兩壓一拉”,這種應(yīng)力狀態(tài)是巖爆、片幫等地質(zhì)災(zāi)害的誘導(dǎo)因素之一,因此開(kāi)展巖石拉伸破壞試驗(yàn)十分必要。
針對(duì)深部軟巖巖石力學(xué)問(wèn)題,國(guó)內(nèi)學(xué)者進(jìn)行了多方位深入的研究,并取得了諸多顯著成果。孫曉明等研制了真三軸軟巖非線性力學(xué)試驗(yàn)系統(tǒng),可實(shí)現(xiàn)單軸、雙軸、三軸壓縮試驗(yàn),單向拉伸試驗(yàn),巖石或結(jié)構(gòu)面剪切試驗(yàn),一向拉一向壓一向拉兩向壓等多種組合試驗(yàn)。張廣清等研制了軟巖真三軸試驗(yàn)裝置,可實(shí)現(xiàn)大尺寸軟巖試樣的三向壓縮試驗(yàn)。胡縣研制了雙向徐變?cè)囼?yàn)機(jī),并進(jìn)行雙向壓縮試驗(yàn)研究軟巖的多軸力學(xué)特性。
目前,現(xiàn)有的軟巖真三軸試驗(yàn)機(jī)多采用外框架和內(nèi)框架正交布置方式,在外框架的上、下、前、后4個(gè)方向上共設(shè)有4個(gè)加載油缸,內(nèi)框架采用自平衡結(jié)構(gòu),并設(shè)有1個(gè)加載油缸,以實(shí)現(xiàn)真三軸六面受力加載模擬,布置在外框架后側(cè)的加載油缸可以實(shí)現(xiàn)單面快速卸荷。
但是,由于現(xiàn)有的軟巖真三軸試驗(yàn)機(jī)采用油缸提供動(dòng)力,使得加載過(guò)程能耗大,且對(duì)環(huán)境有一定的污染。再有,現(xiàn)有的軟巖真三軸試驗(yàn)機(jī)的內(nèi)框架采用傳壓柱,這會(huì)減小真三軸試驗(yàn)機(jī)的整機(jī)剛度,難以獲得巖石試樣的峰后力學(xué)行為。另外,現(xiàn)有的軟巖真三軸試驗(yàn)機(jī)采用油壓提供卸荷動(dòng)力,這種方式雖然在一定程度上能夠滿足快速卸荷的要求,但油壓卸荷存在資源浪費(fèi)大且容易污染環(huán)境的缺點(diǎn)。油壓過(guò)大時(shí)不但對(duì)油路管道沖擊大,并且容易發(fā)生危險(xiǎn)事故,而且配套的液壓站也存在體積大的弊端,導(dǎo)致空間占用率高且成本增加。最后,現(xiàn)有的軟巖真三軸試驗(yàn)機(jī)大多不能提供三向拉伸試驗(yàn)平臺(tái),也就無(wú)法開(kāi)展巖石在多軸拉伸應(yīng)力狀態(tài)下的力學(xué)行為研究工作。
基于上述分析,本文研制了拉伸-壓縮-瞬時(shí)卸載復(fù)合加載式軟巖真三軸試驗(yàn)機(jī),模擬深部軟巖體多軸應(yīng)力狀態(tài),為研究軟巖大變形破壞行為和力學(xué)機(jī)理提供了試驗(yàn)設(shè)備基礎(chǔ)。
PART
(1)3個(gè)方向具有獨(dú)立的剛性加卸載能力。
(2)具有靜態(tài)加載能力,可獲得軟巖等材料全應(yīng)力-應(yīng)變曲線、應(yīng)力-位移曲線、應(yīng)力-時(shí)間曲線、力-變形曲線、力-位移曲線、力-時(shí)間曲線、變形-時(shí)間曲線、位移-時(shí)間曲線。
(3)具有力、位移和變形控制方式了,并可平滑切換,加卸載路徑可實(shí)現(xiàn)計(jì)算機(jī)編程控制,具備循環(huán)加卸載功能。
(4)可完成單軸、雙軸、真三軸壓縮、真三軸拉伸、拉伸壓縮復(fù)合(1軸拉伸 2軸壓縮/2軸拉伸 1軸壓縮)、瞬時(shí)卸載(巖爆)、聲發(fā)射、低頻擾動(dòng)等試驗(yàn)。
(5)采用電磁卸載結(jié)構(gòu),實(shí)現(xiàn)一個(gè)軸指定方向上瞬時(shí)卸載,形成自由面。
(6)采用球頭-雙層滾排加載頭,消除試樣加載過(guò)程中表面應(yīng)力分布不均和端部摩擦效應(yīng)。
(7)夾具采用互扣式聯(lián)動(dòng)夾具結(jié)構(gòu),消除應(yīng)力空白角。
(8)夾具設(shè)有聲發(fā)射傳感器安裝孔,避免外界因素對(duì)聲發(fā)射信號(hào)產(chǎn)生干擾,進(jìn)而完成聲發(fā)射試驗(yàn)。
(9)試驗(yàn)過(guò)程中試樣形心位置不變,與加載軸中心重合。
(1)最大加載能力:
水平X軸:壓縮100kN,拉伸 50kN;
水平Y(jié)軸:壓縮200kN,拉伸 50kN;
垂直Z軸:壓縮300kN,拉伸 50kN。
(2)試驗(yàn)系統(tǒng)測(cè)力精度≤±0.5%示值。
(3)瞬時(shí)卸載速率=200kN/s,卸荷行程 20mm。
(4)試樣尺寸:50mmx50mmx100mm。
(5)加載速率:力5N/s~5kN/s,
變形 0.003mm/min~2mm/min,
位移0.01mm/min~50mm/min。
(6)最大主應(yīng)力加載框架剛度1.0GN/m,其余主應(yīng)力加載框架剛度 0.7GN/m。
PART
軟巖真三軸試驗(yàn)機(jī)主要有主機(jī)系統(tǒng)、電控系統(tǒng)、軟件系統(tǒng)組成,如圖1所示。
1. 主機(jī)系統(tǒng) 2. 電控系統(tǒng) 3. 軟件系統(tǒng)
圖 1 軟巖真三軸試驗(yàn)機(jī)
主機(jī)系統(tǒng)主要由Y軸加載框架、XZ 軸加載框架、加載壓頭、夾具、電磁式瞬時(shí)卸載機(jī)構(gòu)、電動(dòng)伺服作動(dòng)器、力傳感器和附件等組成,如圖 2 所示。
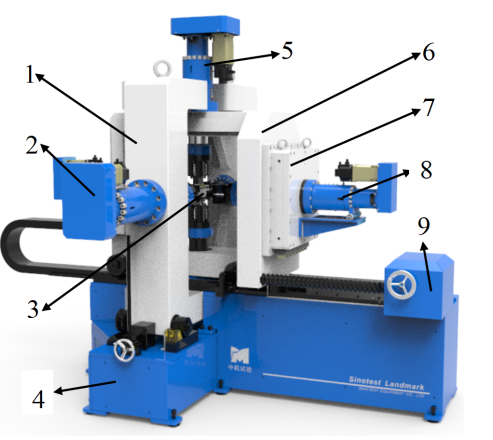
1.Y軸加載框架 2.y軸電動(dòng)伺服作動(dòng)器
3.加載壓頭和夾具 4.支撐底座
5.Z軸電動(dòng)伺服作動(dòng)器 6.XZ軸加載框架
7.電磁式瞬時(shí)卸載機(jī)構(gòu) 8.X軸電動(dòng)伺服作動(dòng)器
9.XZ軸加載框架移動(dòng)機(jī)構(gòu)
圖2主機(jī)系統(tǒng)
加載框架采用“口”字形鑄造封閉結(jié)構(gòu),框架制造后經(jīng)熱處理消除應(yīng)力,然后進(jìn)行加工,平臺(tái)精度高,剛度好,加載框架底部均安裝滾輪和導(dǎo)軌,XZ軸加載框架可自由推出,方便安裝試樣和進(jìn)行雙軸加載試驗(yàn)。
載荷加載由電動(dòng)伺服作動(dòng)器實(shí)現(xiàn)。該作動(dòng)器是將伺服電機(jī)與滾珠絲杠一體化設(shè)計(jì)的模塊化產(chǎn)品,將伺服電機(jī)的旋轉(zhuǎn)運(yùn)動(dòng)通過(guò)絲杠-螺母?jìng)鲃?dòng)副轉(zhuǎn)換成直線運(yùn)動(dòng),同時(shí)將伺服電機(jī)精確的轉(zhuǎn)速控制、精確的轉(zhuǎn)數(shù)控制和精確的扭矩控制轉(zhuǎn)變成精確的速度控制、精確的位置控制和精確的推力控制實(shí)現(xiàn)試驗(yàn)機(jī)的載荷加載功能。各軸電動(dòng)伺服作動(dòng)器固定在加載框架上,力傳感器固定在作動(dòng)器活塞桿前端。隨活塞桿移動(dòng),測(cè)量施加載荷值的同時(shí)用于閉環(huán)控制。
力傳感器前端安裝球頭-雙層滾排的加載頭,可保證載荷施加均勻的同時(shí)消除端部摩擦效應(yīng)。
壓縮夾具采用六面互扣式夾具,保證無(wú)應(yīng)力空白角。夾具壓塊具有安裝聲發(fā)射傳感器孔,可擴(kuò)展聲發(fā)射試驗(yàn),詳細(xì)結(jié)構(gòu)見(jiàn) 4.1 節(jié)內(nèi)容。
拉伸夾具(見(jiàn)圖3)主要靠高強(qiáng)度煤接膠傳遞拉向載荷,夾具拉桿安裝在加載頭前端法蘭,無(wú)需拆卸加載頭,同時(shí)拉桿內(nèi)鑲嵌關(guān)節(jié)軸承,同軸兩側(cè)拉桿形成十字鉸接結(jié)構(gòu),保證試樣受到拉向載荷時(shí),不會(huì)產(chǎn)生附加的彎矩和剪切力,避免影響測(cè)力精度。
電磁式瞬時(shí)卸載機(jī)構(gòu)嵌入式安裝在X軸框架上,與加載作動(dòng)器串聯(lián),其工作原理詳見(jiàn)4.3節(jié)內(nèi)容。
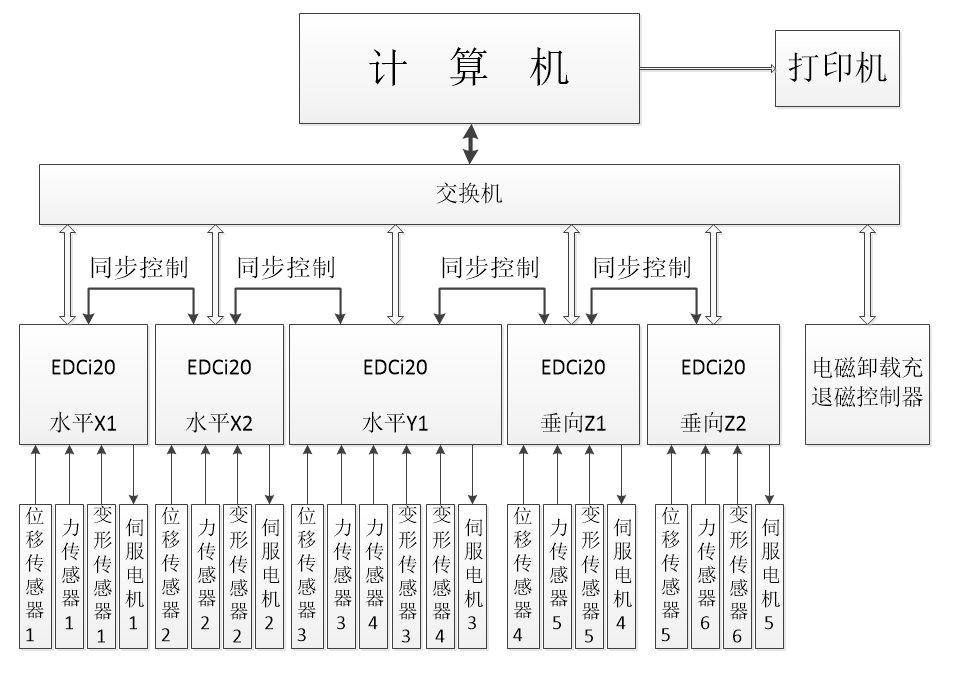
控制系統(tǒng)所用的控制器采用Doli公司的代表產(chǎn)品,型號(hào)為EDCi20,其性價(jià)比較高,是數(shù)據(jù)采集和閉環(huán)控制的檢測(cè)儀器。控制器工作原理為:電控系統(tǒng)給定的電信號(hào)與從力傳感器(或位移傳感器)輸出的反饋信號(hào)相比較,將此差值信號(hào)放大后送至伺服電機(jī)驅(qū)動(dòng)器,從而構(gòu)成閉環(huán)系統(tǒng)。電控系統(tǒng)框圖如圖 4 所示。
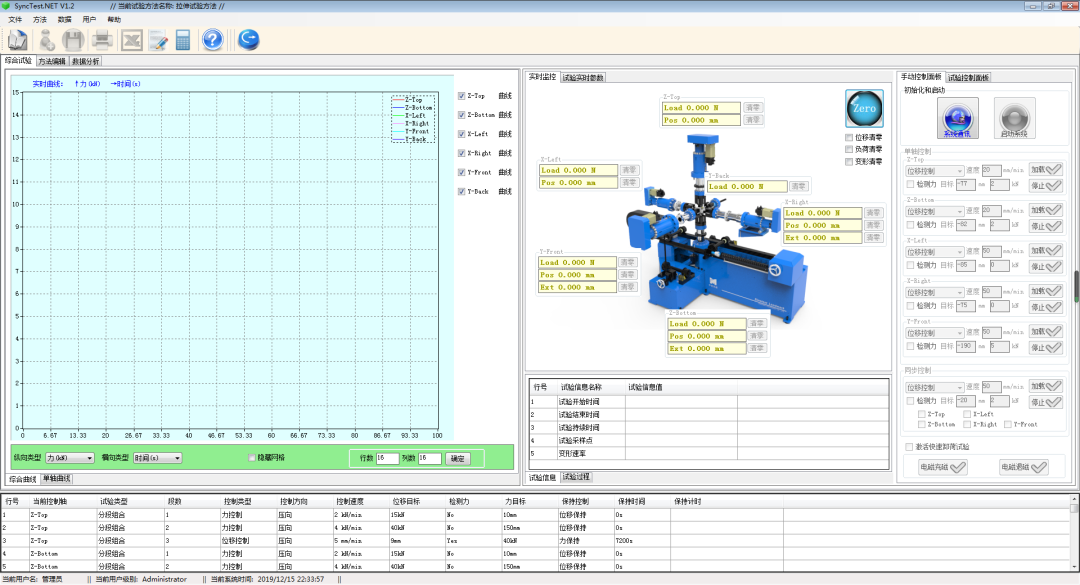
軟件系統(tǒng)為SyncTestExpert多通道靜態(tài)試驗(yàn)軟件 V1.2中文版試驗(yàn)軟件,其功能是按巖石材料三軸靜加載試驗(yàn)的要求,對(duì)試驗(yàn)過(guò)程進(jìn)行控制和對(duì)試驗(yàn)數(shù)據(jù)進(jìn)行采集、處理。試驗(yàn)結(jié)束后,可以將試驗(yàn)曲線和試驗(yàn)報(bào)告打印出來(lái)。軟件界面如圖5所示。

PART
為消除應(yīng)力空白角,壓縮夾具采用六面互扣式夾具,如圖6所示,防止在試樣壓縮變形過(guò)程中產(chǎn)生應(yīng)力空白角。但是,軟巖在壓縮試驗(yàn)過(guò)程中,特別是峰值后階段,σ3方向會(huì)發(fā)生大膨脹變形,隨著試樣的膨脹,夾具 σ2和σ1方向的夾具壓塊會(huì)出現(xiàn)縫隙,產(chǎn)生應(yīng)力空白角。為解決該問(wèn)題,夾具各壓塊的相鄰壓塊之間設(shè)置了 T 形滑塊和滑槽的連接機(jī)構(gòu),使其相對(duì)運(yùn)動(dòng)方向上具有自由度,其余兩個(gè)方向上限制自由度,從而解決應(yīng)力空白角問(wèn)題。

圖 6 互扣式夾具
為解決應(yīng)力空白角,本試驗(yàn)機(jī)采用互扣式夾具。然而這種方式下會(huì)產(chǎn)生較大的切向滑動(dòng)摩擦力,從而減小直接作用在巖石試樣上的載荷,進(jìn)而導(dǎo)致試驗(yàn)數(shù)據(jù)缺乏準(zhǔn)確性。另外,由于巖石試樣具有天然非均質(zhì)性,如果巖石試樣加工精度有限,還會(huì)導(dǎo)致加載過(guò)程中巖石試樣表面產(chǎn)生非均勻且不平行的變形,從而使巖石試樣表面受力不均,進(jìn)而會(huì)影響到巖石試樣的破壞特性。
針對(duì)此問(wèn)題,本試驗(yàn)機(jī)采用球面壓頭與雙層滾排式壓縮傳力加載頭(如圖7所示)。消除切向滑動(dòng)摩擦力引起的附加載荷,在加載過(guò)程中能夠確保巖石試樣表面實(shí)現(xiàn)均布載荷。加載頭的垂向和橫向滾排十字交叉分布,前端布置球面壓頭,這3個(gè)部件直接采用高剛度、高硬度隔板隔開(kāi)。

電磁式瞬時(shí)卸載裝置(如圖8所示)由2個(gè)電磁吸盤(pán)、磁盤(pán)安裝座、加載作動(dòng)器安裝座等組成。2個(gè)電磁吸盤(pán)固定在磁盤(pán)安裝座上,磁盤(pán)安裝座固定在XZ軸加載框架上,加載作動(dòng)器安裝座布置在2個(gè)電磁吸盤(pán)中間,X軸電動(dòng)伺服作動(dòng)器固定在加載作動(dòng)器安裝座上隨其移動(dòng)。
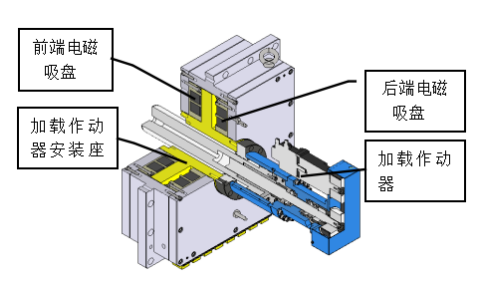
瞬時(shí)卸載裝置的工作原理為:對(duì)試樣加載時(shí),前端電磁吸盤(pán)吸住加載作動(dòng)器安裝座,當(dāng)需要卸載時(shí),前端電磁吸盤(pán)退磁,后端電磁吸盤(pán)充磁,將加載作動(dòng)器安裝座吸回,此時(shí)試樣和加載作動(dòng)器的加載桿相互脫離,試樣該端面加載力瞬時(shí)卸掉。
同步控制首先需要控制器同步,控制器同步的概念包括同步采集和同步控制。同步控制就是系統(tǒng)中所有的控制器在某一時(shí)間點(diǎn)必須統(tǒng)一內(nèi)部時(shí)鐘,然后一起執(zhí)行命令。
本文同步控制方式為:試驗(yàn)機(jī)5個(gè)控制器之間采用同步線連接,實(shí)現(xiàn)同步聯(lián)動(dòng),控制方式為位移控制和力控制兩種方式。當(dāng)試驗(yàn)過(guò)程中控制方式為位移控制時(shí),不管兩根加載軸是聯(lián)動(dòng)還是獨(dú)立加載,均可實(shí)現(xiàn)試樣中心的精確定位及穩(wěn)定性。當(dāng)試驗(yàn)過(guò)程中控制方式為力控制時(shí),實(shí)時(shí)檢測(cè)位移量來(lái)實(shí)現(xiàn)閉環(huán)控制。這樣,不管兩根加載軸是聯(lián)動(dòng)還是獨(dú)立加載,均可通過(guò)檢測(cè)位移來(lái)實(shí)現(xiàn)試樣中心的精確定位。同步控制原理見(jiàn)圖9。

PART
為驗(yàn)證本試驗(yàn)機(jī)是否滿足研制要求,進(jìn)行了一系列標(biāo)定工作和功能驗(yàn)證工作。
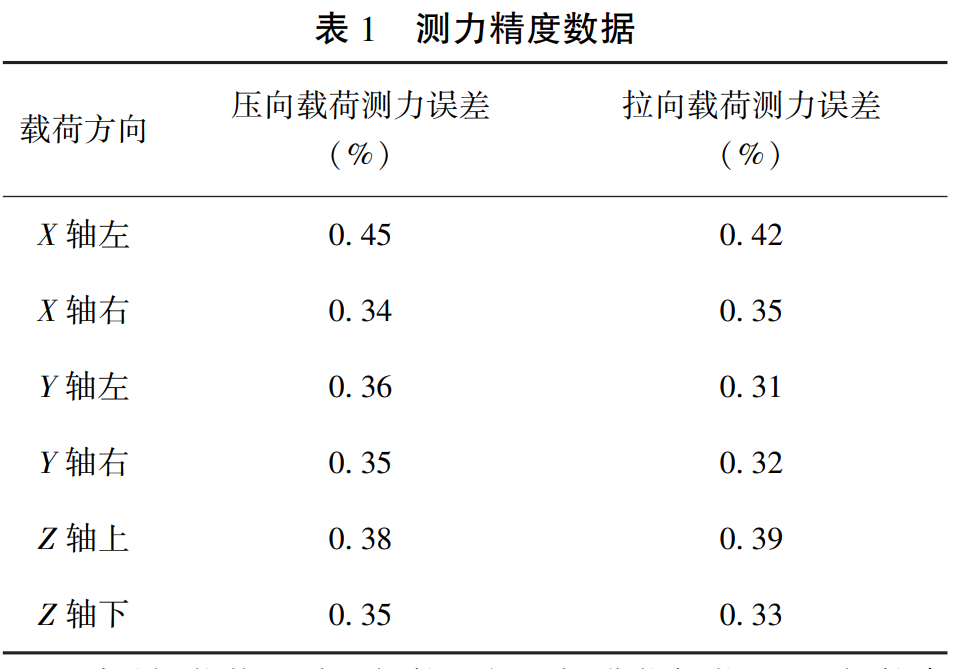
各軸試驗(yàn)加載力均采用標(biāo)準(zhǔn)力傳感器,按GB/T 16825.1-2002《靜力單軸試驗(yàn)機(jī)的檢驗(yàn) 第1部分:拉力和(或) 壓力試驗(yàn)機(jī)測(cè)力系統(tǒng)的檢驗(yàn)與校準(zhǔn)》標(biāo)準(zhǔn)中的要求進(jìn)行標(biāo)定,結(jié)果見(jiàn)表1,標(biāo)定結(jié)果滿足研制要求。
瞬時(shí)卸載裝置采用軟件進(jìn)行施加滿載保載測(cè)試,軟件命令值和反饋值見(jiàn)表2,可以看出,最大載荷能夠達(dá)到 100kN,且精度較高。另外進(jìn)行了瞬時(shí)卸載功能驗(yàn)證,試驗(yàn)加載力-時(shí)間曲線如圖10所示。試驗(yàn)結(jié)果顯示,卸載用時(shí)約0.02s,滿足要求。

另外,從試驗(yàn)功能的角度,采用巖石材料做了三向壓縮試驗(yàn)和三向拉伸試驗(yàn)(如圖11所示)。試驗(yàn)結(jié)果表明,夾具以及配套工裝都達(dá)到了預(yù)期的功能要求。
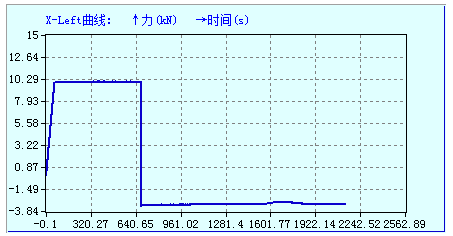
圖10 加載力-時(shí)間關(guān)系
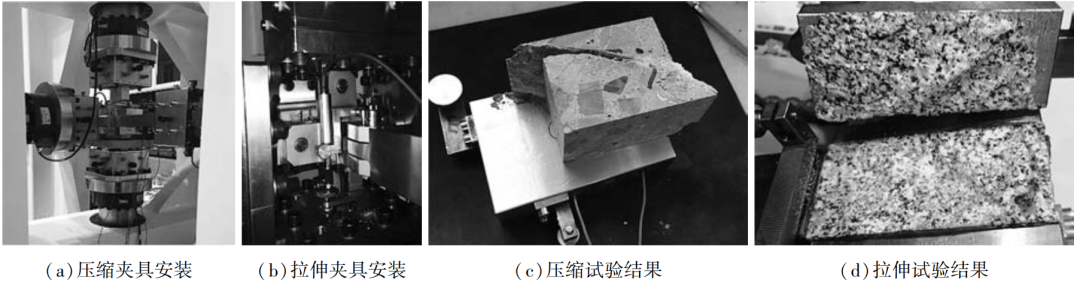
圖 11 壓縮和拉伸試驗(yàn)圖
為了研究軟巖在真實(shí)復(fù)雜應(yīng)力狀態(tài)(三向壓縮應(yīng)力狀態(tài)、單向快速卸荷條件、三向拉伸應(yīng)力狀態(tài)或壓縮拉伸復(fù)合應(yīng)力狀態(tài))下的變形破壞行為和力學(xué)機(jī)理,本文研制了拉伸壓縮-瞬時(shí)卸載復(fù)合加載式軟巖真三軸試驗(yàn)機(jī)。該試驗(yàn)機(jī)具有電動(dòng)加載、消除應(yīng)力空白角、保證試樣受力均勻、單向電磁式瞬時(shí)卸載、試驗(yàn)過(guò)程中試樣中心不變等功能特點(diǎn),同時(shí)可實(shí)現(xiàn)多種應(yīng)力路徑下的單軸、雙軸、真三軸、巖爆、聲發(fā)射、低頻擾動(dòng)等試驗(yàn)。














請(qǐng)先 登錄后發(fā)表評(píng)論 ~